
Quantengestützte Roboter-Haltungsoptimierung: Shibaura Institute of Technology, Waseda University und Fujitsu präsentieren bahnbrechende Methode
Neue Hybrid-Architektur ermöglicht präzisere und effizientere inverse Kinematik für komplexe Robotersysteme durch Qubit-basierte Darstellung und Quantenverschränkung
München, 26. August 2025
Das Shibaura Institute of Technology (Associate Professor Takuya Otani, Fakultät für Systemwissenschaften und Ingenieurwesen, Human Robot System Laboratory), die Waseda University (Professor Atsuo Takanishi, Fakultät für Natur- und Ingenieurwissenschaften) und Fujitsu Limited haben heute die Entwicklung einer innovativen Methode zur effizienten Steuerung der Roboterhaltung unter Nutzung von Quantencomputertechnologie bekannt gegeben. Dieser Ansatz ermöglicht die präzise und effiziente Berechnung der inversen Kinematik für mehrgelenkige Robotersysteme durch eine neuartige Qubit-basierte Positionsdarstellung und die Anwendung von Quantenverschränkung. Erste Verifizierungen auf Fujitsus Quantensimulator demonstrierten eine Fehlerreduktion von bis zu 43 Prozent bei gleichzeitig signifikant reduziertem Rechenaufwand im Vergleich zu konventionellen Methoden. Die Wirksamkeit der Quantenverschränkung wurde zudem durch ein Experiment auf dem gemeinsam von RIKEN und Fujitsu entwickelten 64-Qubit-Quantencomputer bestätigt.
Die Kerninnovation liegt in der Fähigkeit, die Ausrichtung und Position jedes Robotergelenks als Qubit auszudrücken und den strukturellen Einfluss von übergeordneten Gelenkbewegungen auf nachfolgende Gelenke mittels Quantenverschränkung abzubilden. Dies führt zu einer drastischen Reduzierung der notwendigen Berechnungen im Vergleich zu klassischen Algorithmen. Mit dem fortschreitenden Übergang des Quantencomputings von der Forschung zur praktischen Anwendung wird diese Entwicklung als entscheidender Schritt zur Realisierung von Robotersystemen der nächsten Generation angesehen, die Echtzeitsteuerung und hochkomplexe Betriebsfunktionen erfordern.
Quantentechnologie adressiert Herausforderungen der inversen Kinematik
Die Haltungssteuerung von Robotern basiert fundamental auf der Berechnung der inversen Kinematik, bei der aus der gewünschten Position eines Endeffektors (beispielsweise einer Roboterhand) die notwendigen Gelenkwinkel berechnet werden, damit dieser Punkt erreicht wird. Insbesondere bei Robotern mit mehreren Gelenken existieren zahlreiche Kombinationsmöglichkeiten für die Gelenkwinkel, was iterative Berechnungen zur Minimierung der Abweichung von der Zielposition notwendig macht und zu einem erheblichen Rechenaufwand führt. Für ein Ganzkörper-Mehrgelenkmodell mit 17 Hauptgelenken, analog zur menschlichen Anatomie, ist die Anzahl der erforderlichen Berechnungen für eine direkte Lösung zu groß. Aktuelle Ansätze beschränken sich oft auf Modelle mit näherungsweise 7 Gelenken, was jedoch die Bewegungsfluiditätlimitiert.
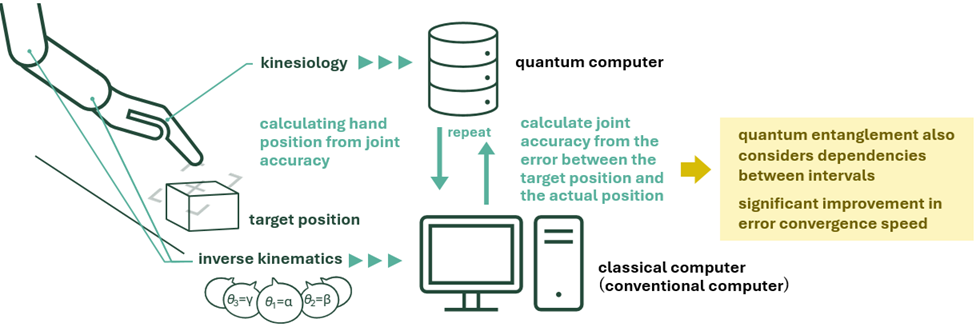
Die vorgestellte Forschung schlägt eine neuartige Methode vor, die die inhärenten Fähigkeiten von Quantencomputern zur Bewältigung dieser Herausforderungen nutzt. Die Ausrichtung und Position jedes Robotersegments (Link) wird durch Qubits repräsentiert, und die Vorwärtskinematik – die Berechnung der Endeffektorposition aus den Gelenkwinkeln – wird mithilfe von Quantenschaltungen durchgeführt. Die eigentlichen inversen Kinematikberechnungen erfolgen auf klassischen Computern, wodurch ein effizienter hybrider quanten-klassischer Ansatz für die Haltungssteuerung realisiert wird.
Beschleunigte Konvergenz und erhöhte Genauigkeit durch Quantenverschränkung
Durch die Anwendung von Quantenverschränkung wird die kausale Struktur, bei der die Bewegung übergeordneter Gelenke die untergeordneten Gelenke beeinflusst, direkt auf dem Quantenschaltkreis abgebildet. Dies führt zu einer signifikanten Verbesserung der Konvergenzgeschwindigkeit und der Genauigkeit der inversen kinematischen Berechnungen. Experimentelle Berechnungen zeigten, dass Bewegungsberechnungen für ein Ganzkörper-Mehrgelenkmodell mit 17 Gelenken in etwa 30 Minuten durchgeführt werden konnten.
Potenzielle Anwendungen und zukünftige Entwicklungen
Diese Methode ermöglicht die Darstellung der Haltung von Mehrgelenk-Robotern mit einer vergleichsweise geringen Anzahl von Qubits, was die Implementierung selbst auf aktuellen NISQ-Quantencomputern (Noisy Intermediate-Scale Quantum) erlaubt. Zukünftige Anwendungen umfassen die Echtzeitsteuerung humanoider Roboter und komplexer mehrgelenkiger Manipulatoren, wie beispielsweise Roboterarme, die Hindernisumgehung sowie die Energieoptimierung. Weitere Leistungssteigerungen werden durch die Kombination mit fortgeschrittenen Quantenalgorithmen, wie der Quanten-Fourier-Transformation, erwartet.
Details zur wissenschaftlichen Publikation
Autoren:
- Takuya Otani, Shibaura Institute of Technology, Fakultät für Systemwissenschaften und Ingenieurwesen
- Atsuo Takanishi, Waseda University, Fakultät für Natur- und Ingenieurwissenschaften
- Nobuyuki Hara, Fujitsu Limited
- Yutaka Takita, Fujitsu Limited
- Koichi Kimura, Fujitsu Limited
Titel: Quantum computation for robot posture optimization
Zeitschrift: Scientific Reports, Nature Portfolio
DOI: 10.1038/s41598-025-12109-0
# # #
Weitere Informationen über Fujitsu erhalten Sie über
- Fujitsu Newsroom https://www.fujitsu.com/de/about/resources/news/press-releases/
- Fujitsu Bildmaterial und Media Server: http://mediaportal.ts.Fujitsu.com/pages/portal.php
- Fujitsu Aktuell: http://www.fujitsu.com/de/fujitsuaktuell
- LinkedIn: http://www.linkedin.com/company/fujitsu
- Facebook: http://www.facebook.com/Fujitsu.DE
Über Fujitsu
Fujitsu ist ein globaler Partner für die Digitale Transformation und hat sich zum Ziel gesetzt, die Welt nachhaltiger zu gestalten und mit Innovationen das Vertrauen in die Gesellschaft zu fördern. Mit rund 113.000 Mitarbeitern unterstützt Fujitsu seine Kunden weltweit, einige der größten Herausforderungen der Menschheit zu lösen. Das Dienstleistungs- und Lösungsportfolio für nachhaltige Transformation basiert auf fünf Schlüsseltechnologien: AI, Computing, Networks, Data & Security und Converging Technologies. Im Geschäftsjahr 2024 (zum 31. März 2025) erzielte Fujitsu Limited (TSE:6702) mit Hauptsitz in Tokio, Japan, einen konsolidierten Jahresumsatz von 3,6 Billionen Yen (23 Milliarden US-Dollar) und bleibt, gemessen am Marktanteil, das führende Unternehmen für digitale Dienstleistungen in Japan. http://www.fujitsu.com/de/
Melanie Saß
Telefon: +49 (0) 174 309 10 33
E-Mail: melanie.sass@fujitsu.com
Unternehmen: Fujitsu Central Europe
Datum: 26. August 2025
City: München