![]()
Archived content
NOTE: this is an archived page and the content is likely to be out of date.
Fujitsu Laboratories Announces Breakthrough in Enabling Humanoid Robots to Learn Movement using Dynamically Reconfigurable Neural Networks
Fujitsu Laboratories Ltd.
Fujitsu Laboratories, Ltd. today announced that it has developed the world's first learning system for humanoid robots that uses a dynamically reconfigurable neural network(1) to enable the efficient learning of movement and motor coordination. This achievement is a significant leap forward in the development of humanoid robots, making the generation of motion in a humanoid robot, for which complex controls are required, a dramatically faster and simpler process.
Details on this system will be made public at ROBODEX2003, held at Pacifico Yokohama (Japan) from April 3 to 6. In addition, this work was presented earlier this month at the Robotics Symposia in Shizuoka, Japan.
Background
In recent years, domestic robots(2) have been a key area of research in the field of robotics, especially humanoid robots. In the not-too-distant future, robots are expected to live alongside humans and handle many domestic tasks. Until now, motion generation and control for a humanoid robot involved very complex calculations of dynamics, requiring considerable computing power. Moreover, it was thought that an even higher computing power was required to enable robots to respond instantly to changing situations. One method of resolving this problem that drew considerable attention was the use of a neural network based control system, which mimics the way living things learn. But neural networks have so far proven to be very slow in learning movements, requiring days or even months, and they have been unable to generate a variety of motions efficiently.
About the Technology
Fujitsu's new technology is based on Central Pattern Generator (CPG)(3) networks, which mathematically simulate the neural oscillator(4) found in vertebrates. This is combined with a Numerical Perturbation Method (NP)(5) that quantifies the configuration and connection-weight status of the network. This combination, known as CPG/NP learning, is optimized in the new technology. In addition, Fujitsu simultaneously developed a software program, known as the Humanoid Movement-Generation System, which enables humanoid robots to learn a wide range of movements.
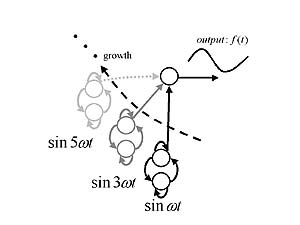
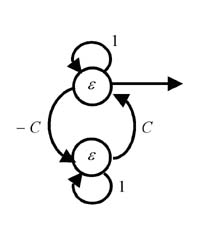 Figure 1 shows a paradigm of CPG and the NP method using CPG.
Figure 1 shows a paradigm of CPG and the NP method using CPG.
 Figure 2 shows the neural network and the full-body movements generated by the new method.
Figure 2 shows the neural network and the full-body movements generated by the new method.Key Features of the New System
- Unprecedented learning flexibility
The system enables unprecedented flexibility in learning movements, thanks to a neural network that is dynamically reconfigured using multiple central pattern generators and the numerical perturbation method, which selects the best movements for the humanoid robot. The central pattern generators generate motion in the robot using self-induced oscillations. These are evaluated using a pre-set evaluation function that determines whether the movement is correct or incorrect.
The robot's movements are altered by slightly changing the connection weights of the central pattern generators, and this process is repeated until the robot is moving well. At that point, with Fujitsu's newly developed method, the numerical perturbation method will, as needed, either generate a new central pattern generator or reconfigure existing combinations, and thereby automatically select the most appropriate movement as the neural network is being dynamically reconfigured.
The learning process is not simply a matter of changing the connection weights; the structure of the network itself changes so that it can learn a variety of complex motions. - Fast learning and execution with minimal software
This approach to development greatly minimizes the size of software code involved in motion control, cutting it to less than one-tenth that used in conventional systems. Learning time is reduced to an astonishing 10-30th of the time previously required (assuming a robot with 20 movable joints). This enables the robot to learn to adapt and instantly react as it moves about in a virtual real-world environment.
- Humanoid motion-generation system
The new technology also forms the basis for a prototype humanoid motion-generation system. Comprised of a neural network display/edit unit, a robot simulation unit, and a mechanical interface (Figure 4), this system enables even people without any expertise in the field of dynamics to generate the desired movements in humanoid robots. Fujitsu has also developed a programming language designed specifically for coding neural networks (a neural-network language), enabling networks to be created and edited using an editing function. Later this year the software system will be included in the HOAP Series of humanoid robots that are already being marketed by Fujitsu Automation Limited.
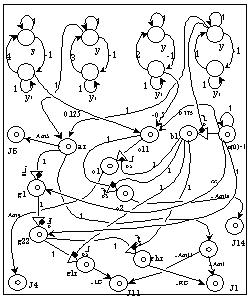 Figure 3 The neural network learning the movements of climbing stairs and writing.
Figure 3 The neural network learning the movements of climbing stairs and writing.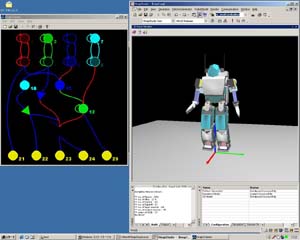 Figure 4 Screen-shot of humanoid movement-generation system
Figure 4 Screen-shot of humanoid movement-generation system-
[1] neural network
A mathematical model of the nervous system found in humans and animals. Applications in such areas as character recognition and shape recognition have produced noteworthy results.
-
[2] domestic robots
Robots that would live with and assist people in everyday tasks. Issues such as safety and control mechanisms are among the R&D challenges in this field, in contrast to industrial robotics.
-
[3] Central Pattern Generator (CPG)
A neural-oscillator system that combines multiple neural oscillators, similar to features found in earthworms and lampreys. A new type of neural network used in engineering.
-
[4] neural oscillator
Part of the central nervous system that is found in vertebrates and believed to generate a periodic rhythm.
-
[5] Numerical Perturbation Method (NP)
A method of analysis used to approximate nonlinear functions that are difficult to analyze. Long used to calculate satellite orbits, this technique has more recently been applied to fluid dynamics and quantum dynamics. The numerical perturbation method uses a computer to numerically process perturbations.
About Fujitsu Laboratories Ltd.
Founded in 1968 as a wholly owned subsidiary of Fujitsu Limited, Fujitsu Laboratories Limited is one of the premier research centers in the world. With a global network of laboratories in Japan, China, the United States and Europe, the organization conducts a wide range of basic and applied research in the areas of Multimedia, Personal Systems, Networks, Peripherals, Advanced Materials and Electronic Devices.
For more information, please see: www.labs.fujitsu.com
Press Contacts
Minoru Sekiguchi, Scott IkedaPublic & Investor Relations
Inquiries
![]() Phone: +81-3-3215-5259 (Tokyo)
Phone: +81-3-3215-5259 (Tokyo)
Fax: +81-3-3216-9365
Company:Fujitsu Limited
Technical Contacts
Fumio NagashimaPeripherals Systems Laboratories
![]() Phone: +81-46-250-8840
Phone: +81-46-250-8840
![]() E-mail: nagashima.fumio@jp.fujitsu.com
E-mail: nagashima.fumio@jp.fujitsu.com
Company:Fujitsu Laboratories Ltd.
All company/product names mentioned may be trademarks or registered trademarks of their respective holders and are used for identification purpose only.
Please understand that product prices, specifications and other details are current on the day of issue of the press release, however, may change thereafter without notice.
Press Release ID: 2003-0057
Date: 27 March, 2003
City: Tokyo
Company:
Fujitsu Laboratories Ltd.,
,
,
,
,