
ロボット

ご利用にあたっての注意
この講座の内容は、2012年当時の情報です。予告なしに更新、あるいは掲載を終了することがあります。あらかじめご了承ください。
最終更新日 2012年4月19日

どんなロボットなのかな(子ぐま型)
子ぐま型ソーシャルロボットの紹介

着脱できます
毛皮は着脱可能なので、汚れたら洗うことが出来ます。


どんな場所で活躍するのかな(子ぐま型)
人に優しいロボットを目指して、いろいろな所で活躍が期待されています。(高齢者介護施設、家庭、保育施設など)
介護施設
介護施設で自由に触ってもらったり、レクリエーションで一緒に遊んだりして雰囲気を明るくします。(実際に施設で試してもらい「利用者が自然な笑顔になった」など感想をもらいました)

家庭
一緒に生活するパートナーとして、必要な情報を教えてくれます。(例えば天気情報や地震速報など、常に最新情報を教えてくれます)。また、子供の宿題の相手もしてくれます。

保育施設
子供達の遊び相手をしてくれます。(忙しい保育士のお手伝いができます)

特長(子ぐま型)
子ぐま型ソーシャルロボットには、3つの特長があります。
(愛らしさ、豊かな感情表現、相手の目をみてコミュニケーション)
愛らしさ
見た目は子供のくまのぬいぐるみです。モコモコした毛並みは思わず触りたくなるようなやさしい肌触りです。
幼児のようなしぐさは愛らしく、国籍、年齢、性別を問わず好まれるキャラクターです。(国際展示会でも好評でした)
豊かな感情表現
顔(耳、瞬き、口)や手、足を動かしたり、首を傾けるなど、約300通りのふるまい動作が可能です。
相手の目をみてコミュニケーション
鼻に付いている小型カメラを使って相手を見つけると、目を合わせて手振り、身振りのふるまい動作を行います。目を合わせることで、相手に親近感を持ってもらいやすくなります。
相手が複数の場合は、適度な間隔でそれぞれの人の顔を見たり、動きがある人に注目します。
技術ポイント(子ぐま型)
ユーザをあきさせないために、生きているようなふるまいをしています。また、普段の生活の中で、自然にユーザのお手伝いもしています。
生きているようなふるまい
1.意思があるかのような豊かな感情表現
子ぐまの中に約300通りの感情を表現する動作が登録されています。その動作は、子ぐまの感情が、その状態を表す表のどの位置にあるかで決まります。例えば、目が覚めていて、気持ちが良い状態の位置にいる時は、両腕を上げて喜ぶ動作をします。子ぐまの意思は、常に表の中を動いています。
2.相手の表情やしぐさを真似る動作
子ぐまの鼻がカメラで相手の顔を探し出します。相手が首をかしげたら、子ぐまも首をかしげます。手をふったら、子ぐまも手をふる、というような真似る動作をしています。
3.実は必要な「ムダな動き」
ムダに見えて、生きているように見せるために必要な動きがあります。(あくび、鼻歌、居眠りなど)
普段の生活の中で、自然にユーザのお手伝い
1.「元気さ」を観察
普段のふれあいの中でユーザの「元気さ」を数字に表して、離れて暮らす家族に連絡することもできます。「元気さ」の数字は、「動作の活発さ」や「表情の豊かさ」から数字にしています。
- 「動作の活発さ」は、ユーザが手をふったり、おなかを触ったり、たくさん動いていると高くなります。
- 「表情の豊かさ」は、ユーザが大きく笑ったり、表情の変化が多いと高くなります。
どんなロボットなのかな(enon)
enon(エノン)の紹介




- その他にセンサー(距離センサー11個、バンパーセンサー1個)がついています。
- 「enon(エノン)」とは「an exciting nova on network(ネットワークの躍動的な新星)」の頭文字をとったものです。ネットワークと連携し、お客様の作業を支援できる自律的なロボットを意味します。
どんな場所で活躍するのかな(enon)
enon(エノン)はお客様と接する施設(スーパーやデパート、空港や駅、図書館やミュージアム)での活躍が期待されています。
スーパーやデパート
店内施設や商品情報の紹介を、モニターに表示してお客様に伝えます。タイムセールの時は、enon(エノン)が声を出して教えてくれるかもしれません。
空港や駅
今のところ4ヶ国語でお話しができる、国際的なenon(エノン)です。
図書館やミュージアム
館内を歩きながらenon(エノン)のモニタを使って本の検索や案内をしてくれます。10キログラムまでならお腹に本や展示物を載せてお手伝いをします。
特長(enon)
enon(エノン)は5つの大きな特長があります。
(自律走行、荷物の搬送、コミュニケーション、ネットワーク連携、安全性)
自律走行
活動エリアの地図情報を入力しておくと頭のカメラを使って、壁などの位置から現在位置を認識します。指定された場所へ障害物をよけながら移動することができます。
坂道なども車椅子用スロープ程度の角度を登れます。
バッテリーの残量が少なくなると自ら判断し、充電ステーションへ移動し充電します。
荷物の搬送
荷物をenon(エノン)胴体部に最大10キログラムの荷物を乗せて運ぶことができます。
コミュニケーション
音声合成、音声認識機能や、胸部のタッチパネル付モニターなどを使って、人とコミュニケーションをとることができます。
日本語以外にも英語、中国語、韓国語を話せます。
ネットワーク連携機能
無線LANを使用して、外部のサーバからコミュニケーションに必要な情報を送受信したり、遠隔操作するなど、ネットワーク連携できます。
安全性
人と接するために安全を第一に考えた設計になっています。
第三者機関(NPO安全工学研究所様)の安全鑑定を受けています。
技術ポイント(enon)
人の目の機能に近づけるために、独自に開発したLSIで視覚処理をしています。
また、人の中でロボットが働くために、安全性を重視しています。
人の目の機能に近づけるために
人間は物を見る時、右目と左目から得た、左右のズレのある情報を脳の中で一つにすることで正確な位置を認識し、物を立体的に捕らえることができます。
例えば、片目だけで物を見てつかもうとすると上手くつかめなかったりしますね。
視覚処理
1.目になるカメラが顔に6個ついています。正面、左右を見る時にそれぞれ二つ一組で動いています。
2.左右のカメラから撮った映像の特徴点を照合します。照合方法は、三角測量を用いて、特徴点とenon(エノン)までの距離などの位置を割り出します。
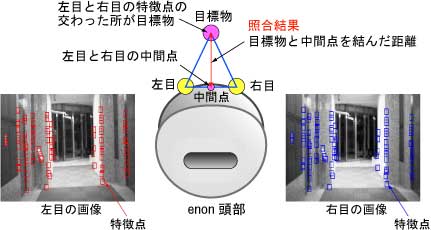
3.enon(エノン)に内蔵されている地図と位置を照合し、現在位置を特定します。

4.1秒間に一回のこの処理を行います。
5.これらの処理を独自に開発したLSIで計算処理をしています。ここでの処理が速ければ速いほど、障害物の検出や次の動作が速くなります。
人の中でロボットが働くために
人間の生活空間の中でロボットが動き回っても危険でないように様々な安全機能をもうけました。
安全性
人の中で動くロボットなので、圧迫感が少ないように130センチメートルの身長になっています。
重心を低くし、転倒しにくくしています。
20度まで傾いても自動復帰できます。
子供が腕にぶら下がったりなど、過度に腕に重さがかかった場合、脱力して腕やモーターが破損しないようにしています。
腕の隙間などに手が挟まって怪我をすることのないようにモーターのパワーを80ワット以下に制御しています。このパワーは、人の近くでロボットが活動しても安全な出力です。(産業用のロボットなどは、ハイパワーなので人が近寄ると危険なので、柵で囲われています。)
可動部分以外の隙間に手が入ったりしないように塞いであります。
形のとがった部分を減らし、まるくしています。
将来
人間とロボットが仲良く暮らしている「こんなロボットがあったらいいな」を絵にしてみました。
(空飛ぶ空気ろ過ロボット、自律移動ロボット、お手伝いロボット)
空飛ぶ空気ろ過ロボット
将来の空を飛び回るピンク色のかわいらしい「くも型ロボット」です。地球に良くない汚い空気を口から吸い込んで、キレイな空気を吐き出してくれます。
自律移動ロボット
スケジュールに合わせて自動移動してくれる「いす型ロボット」です。今日の予定(時間と場所)をあらかじめ教えておくことで、予定の時刻になると知らせてくれて次の場所まで連れて行ってくれます。

お手伝いロボット
街中にあふれている「お手伝いロボット」です。空気を読んで、困っている人に声をかけて助けてくれます。善し悪しの判断プログラムは組み込まれているので、法を無視する行為は丁重にお断りします。
富士通研究所のロボットの歴史
富士通では、様々なロボットを研究してきました。
| 1980年~ | |
|---|---|
| 極限作業ロボット | |
| 宇宙ロボット
|


| 1990年~ | |
|---|---|
| ヒューマンフレンドリロボット | |
|
|
|
|




| 2000年~ | ||||
|---|---|---|---|---|
| 実用ロボット | ||||
| 小型ヒューマノイド | ||||
| → |
| → |
|
| ホームロボット
| サービスロボット
|
| ||






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
関連記事
Connect with Fujitsu Research


